Architecture des systèmes
- Recherche d’approches optimisées et innovantes
- Interaction entre le milieu extérieur, les capteurs, les composants et les sous-systèmes
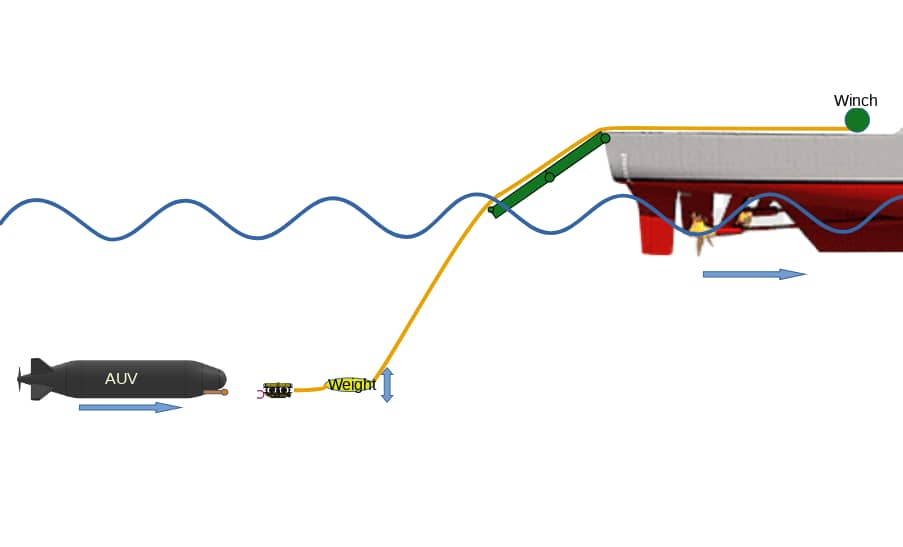
- Stratégies de déploiement
- Dimensionnement puissance, efficacité et pertes
- Techniques de l’alimentation
- Techniques de la communication
- Gestion de connecteurs
- Recherche de composants
- Application aux milieux difficiles:
Confinés, conduites et tunnels immergés, offshore, pression hydrostatique, nucléaire.
Conception mécanique
- Design 3D et mises en plan
- Calculs
- Simulation par éléments finis
- Systèmes étanches et sous pression
- Systèmes et circuits hydrauliques et pneumatiques
Propulsion
- Design et calcul d’hélices
- Design et construction de propulseurs subaquatiques
Fabrication et mise au point
- Consultation fournisseurs et suivi de fabrication
- Assistance au montage
- Organisation et suivi des essais et de la mise au point:
- Analyse des difficultés
- Fiabilisation
- Validation
Gestion de projet
- Analyse des besoins et établissement du cahier de charges
- Analyse fonctionnelle
- Établissement et gestion de budgets et plannings
- Rédaction des rapports et livrables
En collaboration avec des bureaux d’études partenaires:
Électronique et Électrotechnique
- Design de circuits électroniques
- Design et réalisation de cartes électroniques
- Simulations de comportement de circuits électroniques
- Gestion de CEM
- Conceptions de coffrets électrotechniques
- Gestion d’actionneurs et de leurs variateurs
Informatique
- Code pour PC et automates programmables
- Acquisition et traitement des données
- Asservissement
- Design d’IHM
- Navigation autonome